ICRA 2024 - a strong presence from the lab: Andy, Callum, Gwangbin, Ignacio, Marwan, Eric, Ivan, Aalok, Kirill, Xin, Hide, Shikun and Riku.
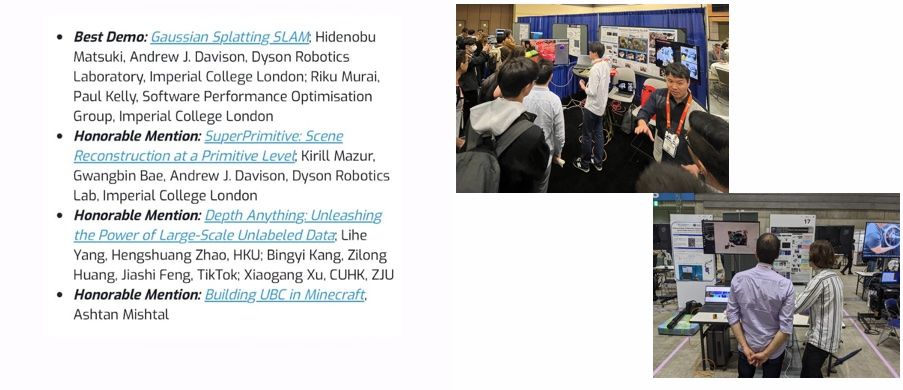
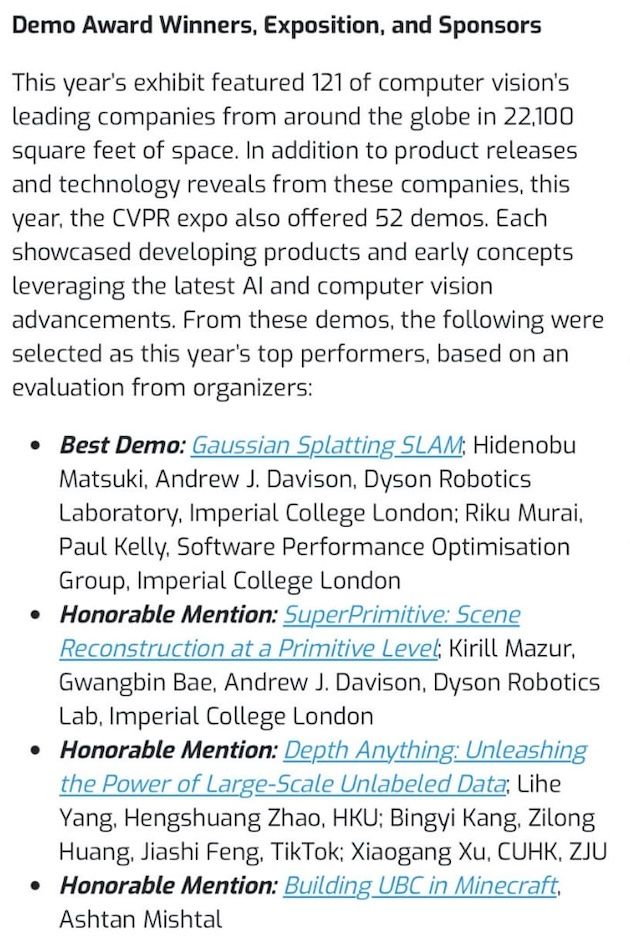
Congratulations to Hide, Riku, Andy and Paul for Best Demo in CVPR 2024 for their Gaussian Splatting SLAM paper. Also congrats to Kirill, Gwangbin and Andy for Honorable Mention for their demo of the SuperPrimitive Scene Reconstruction at a Primitive Level paper.

DRL is pleased to announce that it has secured a total funding of £5.3M from EPSRC and Dyson Ltd for the duration of five years.
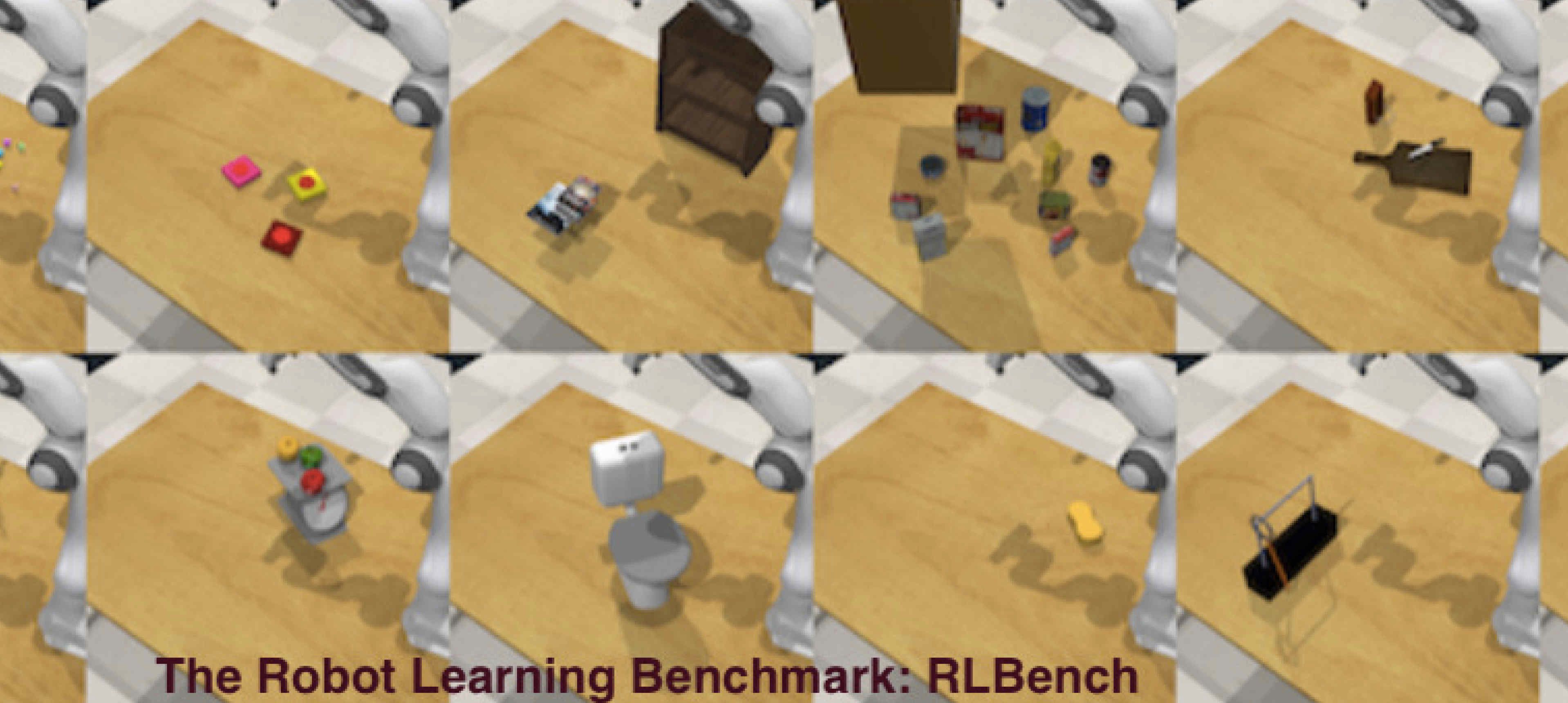
We have recently released a large scale benchmark consisting of 100 unique, hand-designed tasks.

DATAI/INRIA and French Embassy visited the Dyson Robotics Lab
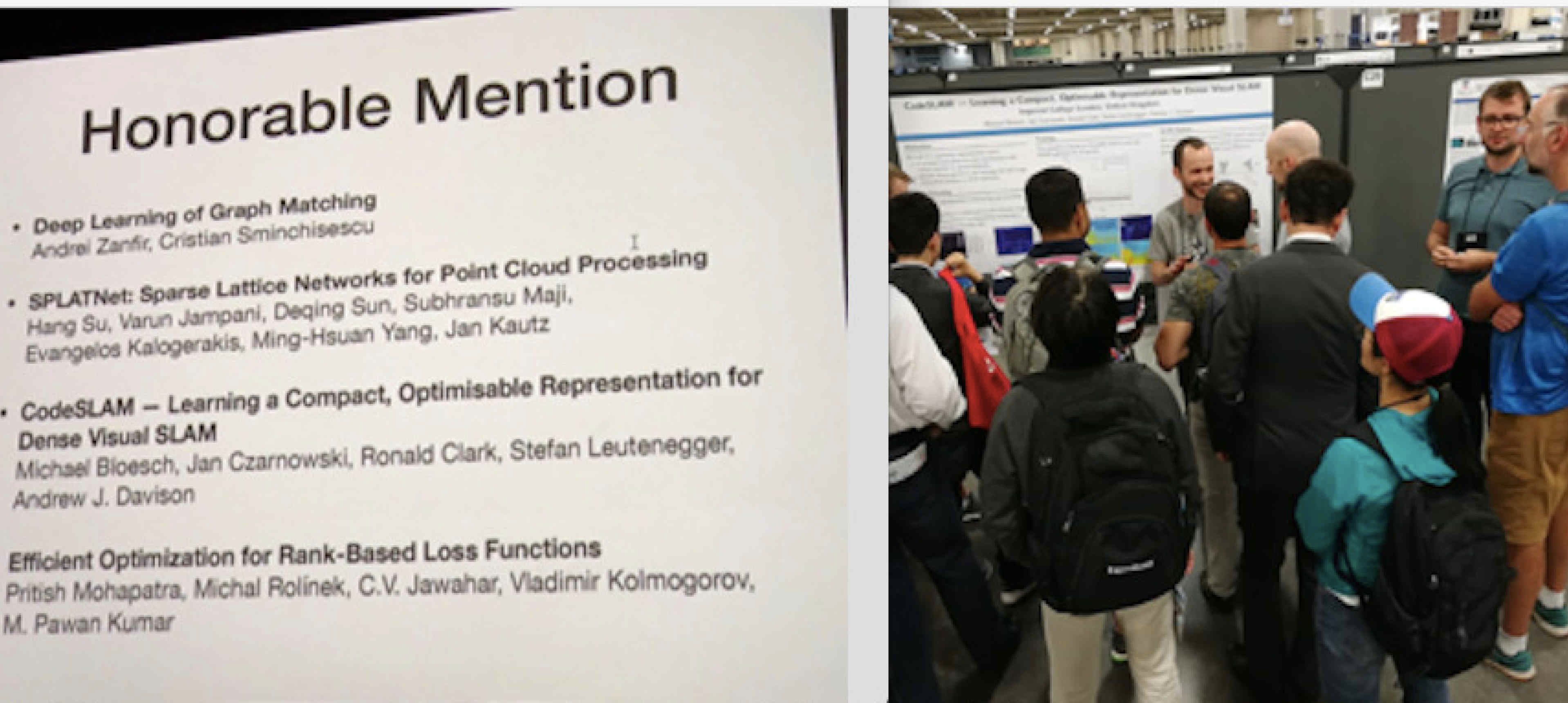
CVPR2018 - Honorable Mention of CodeSLAM paper - Michael and Jan at poster presentation of CodeSLAM

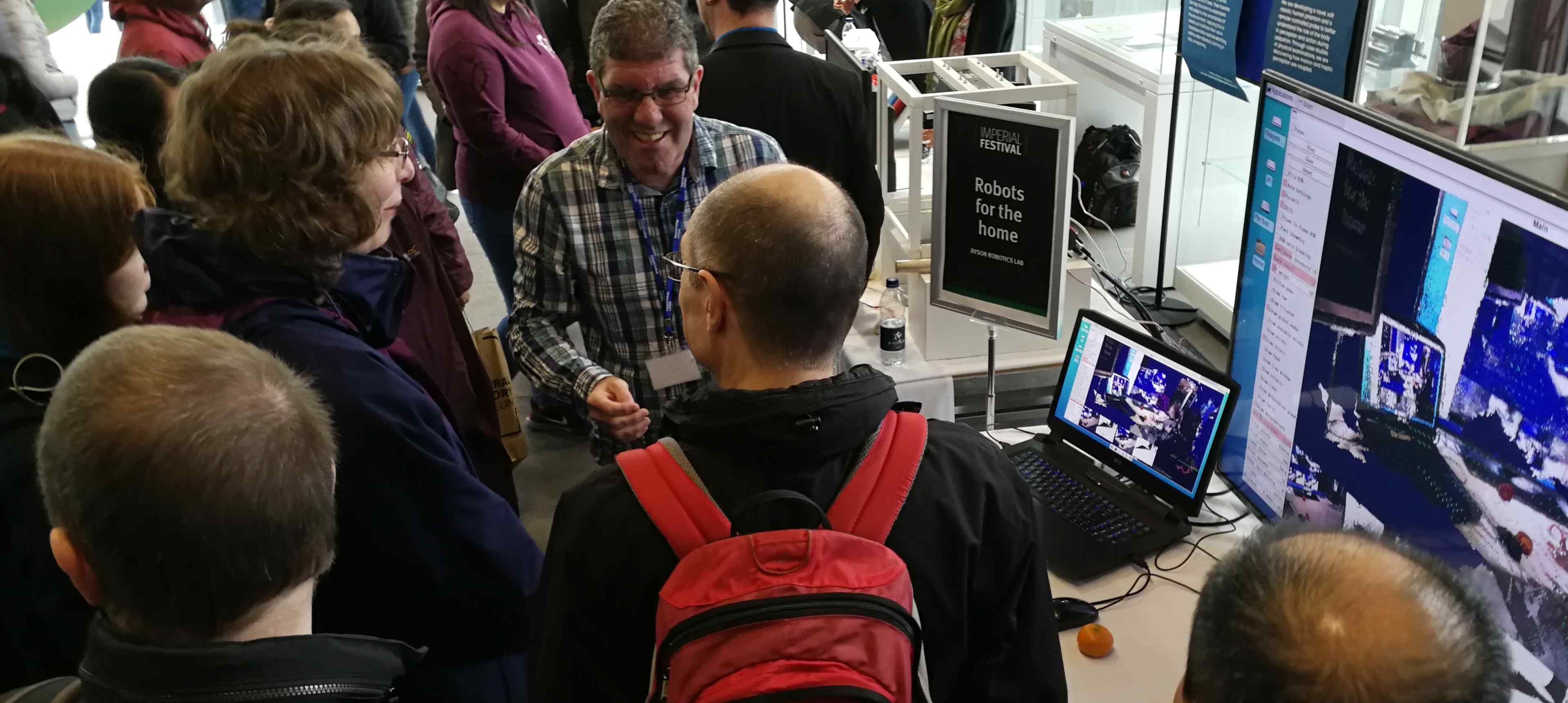
Imperial Festival 2018 - Professor A. Davison and Rob Deaves from Dyson

Imperial Festival 2018 - Professor A. Davison

Imperial Festival 2018 - Shuaifeng Zhi and Zoe Landgraf

Imperial Festival 2018
Imperial Festival 2018

Imperial Festival 2018
Best Demo and Honorable Mention - CVPR 2024
Congratulations to Hide, Riku, Andy and Paul for Best Demo in CVPR 2024 for their Gaussian Splatting SLAM paper. Also congrats to Kirill, Gwangbin and Andy for Honorable Mention for their demo of the SuperPrimitive Scene Reconstruction at a Primitive Level paper.
Professor Andrew Davison - Fellow of Royal Society
Congratulations to Professor Andrew Davison FRS FRSEng! He has been elected as fellow of the Royal Society for his pioneering research contributions to robot vision that span over 25 years.
CVPR 2023
Congratulations to Eric, and Xin, Shikun and Marwan! They will present their papers to CVPR2023
ICRA 2022
We had a great presence at ICRA2022 with two papers from Kentaro (Safepicking and ReorientBot) and a paper from Raluca (now a Robotic Research Engineer at Ocado). Moreover, Andy was a keynote speaker at two ICRA workshops; Robotic Perception and Mapping: emerging techniques and Motion Planning with Implicit Neural Representations of Geometry.
At ICRA 2022, Dyson revealed for the first time its ambitious plans for home robotics. It also announced a new Robot Learning Lab in London, to be headed by our outstanding former group member Stephen James, who is returning to the UK from Berkeley in August. For more information follow the video link.
Two Fellow Positions Available - Closing Date: 27 October 2021
We have one open Fellow position at the Dyson Robotics Lab focusing on breakthrough 3D vision, learning-based semantic SLAM and vision-guided manipulation. We work on long-term publishable research while also collaborating with Dyson on novel applications in home robotics. This position is part of our newly awarded Prosperity Partnership award.
The quality of the researcher we are seeking is reflected by the high salary we are able to offer for this position. We expect the researcher to publish and be visible at the top international venues in robotics and computer vision, and also to develop working demonstrators of new capability which could feed into Dyson's R&D operations. Examples of recent high profile published research from the Dyson Robotics Lab include ElasticFusion, SemanticFusion, SceneNet-RGBD, Fusion++, LS-Net and CodeSLAM, as well as work on training grasping and manipulation systems via learning from synthetic data. The ideal candidate will have a strong background in modern 3D computer vision, but also a demonstrable interest and track record in the practical software skills which enable high performance real-time applications. More Info.
Recent fellows of the lab include Raluca Scona, Tristan Laidlow, Talfan Evans, Michael Bloesch, Ronnie Clark, Sajad Saeedi, Ed Johns, Ankur Handa.
Please feel free to get in touch with any informal questions, or follow the links to the adverts for official details on how to apply.
Aug 2021
Congratulations to Edgar, Shuaifeng and Zoe! Three papers have been accepted for ICCV2021!
Fellow Position Available - Closing Date: 22 February 2021
We have one open Fellow position at the Dyson Robotics Lab focusing on breakthrough 3D vision, learning-based semantic SLAM and vision-guided manipulation. We work on long-term publishable research while also collaborating with Dyson on novel applications in home robotics. This position is part of our newly awarded Prosperity Partnership award.
The quality of the researcher we are seeking is reflected by the high salary we are able to offer for this position. We expect the researcher to publish and be visible at the top international venues in robotics and computer vision, and also to develop working demonstrators of new capability which could feed into Dyson's R&D operations. Examples of recent high profile published research from the Dyson Robotics Lab include ElasticFusion, SemanticFusion, SceneNet-RGBD, Fusion++, LS-Net and CodeSLAM, as well as work on training grasping and manipulation systems via learning from synthetic data. The ideal candidate will have a strong background in modern 3D computer vision, but also a demonstrable interest and track record in the practical software skills which enable high performance real-time applications. More Info.
Recent fellows of the lab include Raluca Scona, Tristan Laidlow, Talfan Evans, Michael Bloesch, Ronnie Clark, Sajad Saeedi, Ed Johns, Ankur Handa.
Please feel free to get in touch with any informal questions, or follow the links to the adverts for official details on how to apply.
Research Engineer Position - Closing Date: 11 February 2021
We have one open Research Engineer position at the Dyson Robotics Lab focusing on breakthrough 3D vision, learning-based semantic SLAM and vision-guided manipulation. We work on long-term publishable research while also collaborating with Dyson on novel applications in home robotics.
We look for someone with exceptional engineering skills in applied robotics and computer vision who will play a key role in adding structure to our research efforts and in transferring developments to Dyson's in-house robotics team. More Info.
Please feel free to get in touch with any informal questions, or follow the links to the adverts for official details on how to apply.
14th June 2020
Professor Andrew Davison gave an invited virtual talk at CVPR2020. More Info.
1st June 2020
Professor Andrew Davison gave a virtual talk at CogX on the Research Stage "Research: The Long View". More Info.
14th May 2020
Professor Andrew Davison is giving a virtual talk tomorrow as part of the "Robotics Today - A series of technical talks" organised by MIT and Stanford Universities. More Info. Watch Talk
3rd Feb 2020
Congratulations to Tristan, Jan, Zoe, Stephen and Alessandro for their papers being accepted for ICRA2020! Jan's and Stephen's papers have also been accepted at RAL.
Two Fellow Positions Available - Closing Date: 26 Nov 2019
We have two open Fellow positions at the Dyson Robotics Lab focusing on breakthrough 3D vision, learning-based semantic SLAM and vision-guided manipulation. We work on long-term publishable research while also collaborating with Dyson on novel applications in home robotics. These positions are part of our newly awarded Prosperity Partnership award.
The quality of the researcher we are seeking is reflected by the high salary we are able to offer for this position. We expect the researcher to publish and be visible at the top international venues in robotics and computer vision, and also to develop working demonstrators of new capability which could feed into Dyson's R&D operations. Examples of recent high profile published research from the Dyson Robotics Lab include ElasticFusion, SemanticFusion, SceneNet-RGBD, Fusion++, LS-Net and CodeSLAM, as well as work on training grasping and manipulation systems via learning from synthetic data. The ideal candidate will have a strong background in modern 3D computer vision, but also a demonstrable interest and track record in the practical software skills which enable high performance real-time applications. More Info.
Recent fellows of the lab include Michael Bloesch, Ronnie Clark, Sajad Saeedi, Ed Johns, Ankur Handa.
Please feel free to get in touch with any informal questions, or follow the links to the adverts for official details on how to apply.
Imperial - Dyson - EPSRC Prosperity Partnership Award
The Dyson Robotics Lab at Imperial College is pleased to announce that it has secured a total £5.3M funding from EPSRC and Dyson for the duration of five years under the Prosperity Partnership II scheme (2019). This is in recognition of the outstanding work taking place in the lab led by Professor Andrew Davison, a pioneer in visual SLAM. The lab will expand its fundamental work in computer vision, aiming to develop the technologies which will enable the next generation of home robotic products to perceive, understand and navigate complex scenarios.The funding will allow the lab to offer three fellow positions to outstanding candidates within the area of SLAM, Machine Learning and Robotics and one research engineer position. We will also offer nine studentships to high-calibre students who wish to undertake their studies in any of the fields of our expertise.For more details please keep visiting our website for announcements or email iosifina.pournara at imperial.ac.uk
Closing Date: 25 April 2019
We have one open Fellow position at the Dyson Robotics Lab focusing on breakthrough 3D vision, learning-based semantic SLAM and vision-guided manipulation. We work on long-term publishable research while also collaborating with Dyson on novel applications in home robotics.
The quality of the researcher we are seeking is reflected by the high salary we are able to offer for this position. We expect the researcher to publish and be visible at the top international venues in robotics and computer vision, and also to develop working demonstrators of new capability which could feed into Dyson's R&D operations. Examples of recent high profile published research from the Dyson Robotics Lab include ElasticFusion, SemanticFusion, SceneNet-RGBD, Fusion++, LS-Net and CodeSLAM, as well as work on training grasping and manipulation systems via learning from synthetic data. The ideal candidate will have a strong background in modern 3D computer vision, but also a demonstrable interest and track record in the practical software skills which enable high performance real-time applications. More Info.
Recent fellows of the lab include Michael Bloesch, Ronnie Clark, Sajad Saeedi, Ed Johns, Ankur Handa.
Please feel free to get in touch with any informal questions, or follow the links to the adverts for official details on how to apply.
25th Feb 2019
Congratulations to Shuaifeng for his SceneCode paper being accepted for CVPR2019!
28th Jan 2019
Congratulations to Charlie and Tristan for their papers being accepted for ICRA2019!
Closing Date: 16 September 2018
We have one open Research Engineer position at the Dyson Robotics Lab focusing on breakthrough 3D vision, learning-based semantic SLAM and vision-guided manipulation. We work on long-term publishable research while also collaborating with Dyson on novel applications in home robotics.
We look for someone with exceptional engineering skills in applied robotics and computer vision who will play a key role in adding structure to our research efforts and in transferring developments to Dyson's in-house robotics team. More Info.
Please feel free to get in touch with any informal questions, or follow the links to the adverts for official details on how to apply.
19th June 2018
Great News! CodeSLAM paper was awarded an Honorable Mention at CVPR2018. More Info.
29th May 2018
Congratulations to Dr Stefan Leutenegger who was awarded the President's award for Excellence in Innovation and Enterpreneurship. More Info.
28-29th April 2018
This year Imperial Festival attracted more than 20,000 visitors and Dyson Robotics Lab was there too.
27th March 2018
Estonia's President, Kersti Kaljulaid, visited the Dyson Robotics Lab where Professor Andrew Davison, Dr Stefan Leutenegger and Dr Ed Johns showed how the lab's work in AI and computer vision are finding new applications in home robotics. More Info.
26th March 2018
Congratulations to Michael and Jan. Their CodeSLAM paper has been accepted for an oral presentation in CVPR2018 in Salt Lake City, US. More Info.
25th October 2017
John's McCormac work on SceneNet RGB-D was featured in the ICCV'17 daily magazine. John talks about his work to produce a large dataset for indoor segmentation tasks. More Info.
5th September 2017
Congratulations to Professor Andrew Davison for being selected to the Fellowship of the Royal Academy of Engineering. More Info.
24th July 2017
Two papers have been accepted from our group; one at IROS 2017 and one at ICCV 2017. Congratulations to Tristan and John. More Info.
14th July 2017
The 2nd Uk Robot Manipulation Workshop organised by Ed Johns, a Dyson Fellow at the Dyson Robotics Lab is featured today at Imperial's main website. A nice review of the workshop on robot manipulation that attracted 145 participants from UK academia and industry. More on this.
10-11th July 2017
The 2nd UK Robot Manipulation Workshop will take place on Monday 10th and Tuesday 11th of July at Imperial College London. It is a UK-wide community-building event, bringing together researchers and engineers across both academia and industry. Topics will cover the full range of disciplines in robot manipulation, across both hardware and software, including mechanical design, sensor design, control, haptics, vision, and learning. The workshop is sponsored by Dyson Robotics Lab, Ocado Technology, Shadow Robot Company and IET. More info
3rd April 2017
New York Times journalist visited Professor Andrew Davison a couple of weeks ago. We are proud that our lab and work is mentioned in an article about Dyson pushished today. Click here to read the article
2nd February 2017
We have a Dyson sponsored fellowship available for an outstanding researcher. The deadline for submitting an application is 16th of February. Please follow the link for more information regarding this position.
17th January 2017
We have four papers accepted for ICRA 2017!
Robert Lukierski, Stefan Leutenegger and Andrew J. Davison. Room Layout Estimation from Rapid Omnidirectional Exploration, 2017, IEEE International Conference on Robotics and Automation (ICRA). (dyson funded)
John McCormac, Ankur Handa, Andrew J Davison, Stefan Leutenegger. SemanticFusion: Dense 3D Semantic Mapping with Convolutional Neural Networks, 2017, IEEE International Conference on Robotics and Automation (ICRA). (dyson funded)
Sajad Saeedi, Luigi Nardi, Edward Johns, Bruno Bodin, Paul H J Kelly, Andrew J Davison. Application-oriented Design Space Exploration for SLAM Algorithms, 2017, IEEE International Conference on Robotics and Automation (ICRA). (non-dyson funded)
Lukas Platinsky, Andrew J. Davison, and Stefan Leutenegger. Monocular Visual Odometry: Sparse Joint Optimisation or Dense, 2017, IEEE International Conference on Robotics and Automation (ICRA). (non-dyson funded)
18th December 2016

We introduce SceneNet RGB-D, expanding the previous work of SceneNet to enable large scale photorealistic rendering of indoor scene trajectories. It provides pixel-perfect ground truth for scene understanding problems such as semantic segmentation, instance segmentation, and object detection, and also for geometric computer vision problems such as optical flow, depth estimation, camera pose estimation, and 3D reconstruction. Random sampling permits virtually unlimited scene configurations, and here we provide a set of 5M rendered RGB-D images from over 15K trajectories in synthetic layouts with random but physically simulated object poses. Each layout also has random lighting, camera trajectories, and textures. The scale of this dataset is well suited for pre-training data-driven computer vision techniques from scratch with RGB-D inputs, which previously has been limited by relatively small labelled datasets in NYUv2 and SUN RGB-D. It also provides a basis for investigating 3D scene labelling tasks by providing perfect camera poses and depth data as proxy for a SLAM system.
News 2018-2024














Contact us
Dyson Robotics Lab at Imperial
William Penney Building
Imperial College London
South Kensington Campus
London
SW7 2AZ
Telephone: +44 (0)20 7594-7756
Email: iosifina.pournara@imperial.ac.uk